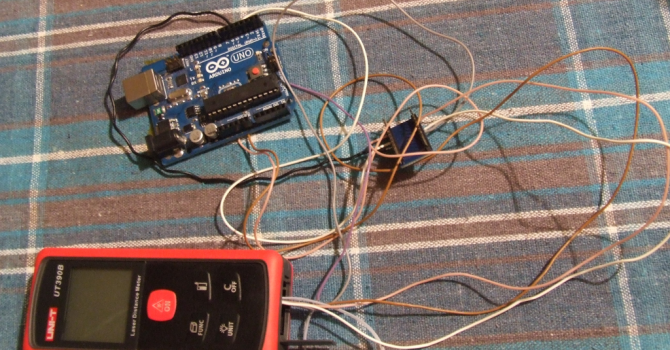
Kontrola UT390B laserskog mjerača udaljenost preko arduina
I prvi kod
#include <SoftwareSerial.h>
#define PowerPin 3
SoftwareSerial mySerial = SoftwareSerial(5, 4); //!< RX is 0. Pin 4 is TX
long inLoop = 0;
int strstart_P(const char *s1, const char * PROGMEM s2)
{
return strncmp_P(s1, s2, strlen_P(s2)) == 0;
}
int getdist(void)
{
char buf[64];
char *comma;
int dist;
int rc;
inLoop = millis();
while (millis()-inLoop < 5000) {
mySerial.print("*004545#");
rc = mySerial.readBytesUntil('\n', buf, sizeof(buf));
buf[rc] = '\0';
if (!strstart_P(buf, PSTR("Dist: ")))
continue;
comma = strchr(buf, ',');
if (comma == NULL)
continue;
*comma = '\0';
dist = atoi(buf + strlen_P(PSTR("Dist: ")));
return dist;
}
}
void setup(void)
{
Serial.begin(115200);
pinMode(5,INPUT);
pinMode(PowerPin,OUTPUT);
digitalWrite(PowerPin,LOW);
// Serial.println(digitalRead(PowerPin));
mySerial.begin(115200);
}
void loop(void)
{
digitalWrite(PowerPin,HIGH);
delay(1000);
digitalWrite(PowerPin,LOW);
Serial.println("Start Automatic Messure");
int dist_mm;
int dist_m;
char buf[128];
dist_mm = getdist();
dist_m = dist_mm / 1000;
snprintf_P(buf, sizeof(buf),
PSTR("Laser distance: %d.%dm"),
dist_m, dist_mm % 1000);
Serial.println(buf);
delay(1000);
mySerial.print("r");
delay(10000);
}